
Producenci prześcigają się w konstruowaniu coraz to lepszych maszyn budowlanych. Dostępny na rynku sprzęt charakteryzuje się dobrymi parametrami w zakresie techniki napędowej, układów hydraulicznych i pneumatycznych, techniki kontrolnej, pomiarowej, nawigacji, a także bezpieczeństwa. Bogata jest również oferta usług dotyczących eksploatacji i serwisu.
Efektywność procesów budowlanych zależy w dużej mierze od wydajności pracy maszyn i urządzeń. Dlatego stworzenie odpowiedniego parku maszyn, sposób jego pozyskania i właściwa eksploatacja powinny być dobrze przemyślane. W artykule dokonano przeglądu maszyn do robót ziemnych i modyfikacji gruntów z uwzględnieniem ich podstawowych parametrów.
Maszyny do zadań specjalnych
Podział maszyn budowlanych zgodnie z ich przeznaczeniem do poszczególnych grup robót został określony w zapisach normy ISO/TR 12602. W zakresie maszyn i urządzeń do robót ziemnych i związanych ze wzmacnianiem gruntu wygląda on następująco:
- grupa nr 100 maszyny i urządzenia do robót ziemnych, wśród których wyszczególniono:
- wstępne roboty ziemne i wykopy szerokoprzestrzenne: nr 110 – spycharki (kołowe, gąsienicowe), nr 120 – ładowarki (kołowe, gąsienicowe), nr 130 – koparko-ładowarki (kołowe, gąsienicowe), nr 140 – koparki (hydrauliczne, linowe, z kołem czerpakowym, łańcuchowe wieloczerpakowe), urządzenia do wyburzania,
- transport mas ziemnych: nr 150 – wywrotki (przegubowe, samochodowe),
- roboty ziemne wykończeniowe: nr 160 – zgarniarki, nr 170 – równiarki,
- wykopy wąskoprzestrzenne i jamiste: nr 180 – koparki do rowów, nr 190 – układarki rur,
- grupa nr 200 – maszyny i urządzenia do fundamentowania i zagęszczania gruntu:
- wykonywanie pali i szczelin: nr 210 – urządzenia do wbijania i wyrywania pali, nr 220 – wiertnice i urządzenia do wykonywania szczelin,
- zagęszczanie gruntów: nr 230 – walce (z bębnami gładkimi, z kołami ogumionymi, inne), nr 240 – urządzenia do zagęszczania (ubijaki, zagęszczarki płytowe wibracyjne).
Jednym z istotnych parametrów maszyn budowlanych są ich wymiary. Nie tylko precyzują wymagania przestrzenne, jakim musi sprostać stanowisko pracy danej maszyny, ale także mają uzasadnienie ekonomiczne. Kolejna istotna właściwość techniczno-ekonomiczna maszyn budowlanych to ich wydajność, która ma ścisły związek z konstrukcją maszyny. Ważną cechą maszyn jest także efektywność, definiowana zwykle jako stosunek efektu pracy do poniesionych nakładów – dla każdej maszyny powinno się dążyć do maksymalizacji jej efektywności ze względów ekonomicznych i środowiskowych [1].
Tab. 1. Przegląd wybranych maszyn do robót ziemnych, wykonywania pali i szczelin [1, 2]
Rodzaj maszyny Zastosowanie Charakterystyczne parametry
spycharki
odspojenie gruntu
i przemieszczenie
urobku na określoną
odległość
moc sinika
małe – do 60 kW
średnie – od 60 do 150 kW
duże – powyżej 150 kW
rodzaj ciągnika kołowe
gąsienicowe
ustawienie lemiesza
w stosunku do osi głównej
maszyny
czołowe (pod kątem prostym)
ukośne (pod kątem innym niż prosty)
uniwersalne (kąt między lemieszem a osią główną maszyny
można zmieniać)
sposób sterowania
lemieszem
mechaniczny (ruchy lemiesza powodowane układem
linowo-krążkowym)
hydrauliczny (ruchy lemiesza powodowane siłownikami
hydraulicznymi)
ładowarki
ładowanie urobku
i przemieszczanie
go w łyżce roboczej
oraz rozkładanie
w określonym
miejscu, w tym na
środki transportu
pojemność łyżki
małe – od 0,4 do 0,8 m3
średnie – od 0,8 do 1,6 m3
duże – od 1,6 do 3,2 m3
bardzo duże – powyżej 3,2 m3 (nawet do 6,0 m3
)
rodzaj podwozia
kołowe
gąsienicowe
Rodzaj maszyny Zastosowanie Charakterystyczne parametry
koparki
oddzielanie urobku
i ładowanie go na
maszyny transportowe lub przeładunek materiałów
sypkich
osprzęt
przedsiębierny
podsiębierny
ładowarkowy
zgarniakowo-zabierakowy
strugowy
chwytakowy
dźwigowy
kafarowy
rodzaj podwozia
koparka samojezdna gąsienicowa
koparka samojezdna kołowa
koparka samojezdna krocząca
koparka na podwoziu samochodowym – samochodowa
koparka na podwoziu ciągnikowym – koparka ciągnikowa
(koparko-ładowarka)
koparka na podwoziu szynowym – koparka szynowa
koparka na pontonie – koparka pontonowa
źródło napędu
spalinowe
elektryczne
spalinowo-elektryczne
spalinowo-hydrauliczne
elektryczno-hydrauliczne
rodzaj przeniesienia mocy
napędu na osprzęt
napęd linowy
napęd hydrauliczny
sposób przeniesienia
napędu
mechaniczny
hydrauliczny
elektryczny
rodzaj sterowania
mechaniczny
hydrauliczny
pneumatyczny
elektryczny
hydrauliczno-elektroniczny
zgarniarki
skrawanie, załadunek i transport mas
ziemnych
pojemność skrzyni
małe – do 5 m3
średnie – od 6 do 15 m3
duże – powyżej 15 m3
układ jezdny samobieżne (transport do 5000 m)
przyczepne (transport od 1000 do 2000 m)
sposób napełniania
urządzenia napełniane sposobem naturalnym
urządzenia napełniane przez wciskanie strugi gruntu
urządzenia z mechanizmami wspomagającymi, np.
elewatorem
sposób opróżnienia skrzyni sposobem grawitacyjnym
sposobem wymuszonym (ruchoma tylna ścianka)
sposób sterowania skrzynią mechaniczny
hydrauliczny
równiarki
wyrównywanie
terenu i prace związane z robotami
wykończeniowymi
obiektów ziemnych
wielkość lemiesza
długość lemiesza od 1,8 do 2 m (równiarki lekkie)
długość lemiesza od 2,5 do 3 m (równiarki średnie)
długość lemiesza od 3,5 do 5 m (równiarki ciężkie)
urządzenia
do wbijania
i wyrywania
pali, wiertnice
i urządzenia do
wykonywania
szczelin
urządzenia do
wbijania – kafary,
urządzenia wyrywające, urządzenia
sondujące, urządzenia do formowania
pali, wgłębiarki
dobór urządzeń jest uzależniony od konkretnej technologii i rodzaju używanych pali
fundamentowych
![Tab. 1. Przegląd wybranych maszyn do robót ziemnych, wykonywania pali i szczelin [1, 2]](/sites/organiczny.site/files/styles/responsive_image_1200/public/media/image/tab1-0.jpg?itok=vIW24xOR)
![Tab. 1. Przegląd wybranych maszyn do robót ziemnych, wykonywania pali i szczelin [1, 2]](/sites/organiczny.site/files/styles/responsive_image_1200/public/media/image/tab1-1.jpg?itok=TaGkWLbB)

Maszyny do głębokiego fundamentowania
- Szeroka oferta i długi okres eksploatacji ze względu na solidną budowę osprzętu
- Niska emisja i wysoka efektywność dzięki inteligentnym systemom napędowym
- Komfort obsługi dzięki innowacyjnej koncepcji sterowania
- Dopasowane narzędzia robocze zapewniają doskonałą wydajność
- Zoptymalizowana konstrukcja dzięki wszechstronnej konsultacji
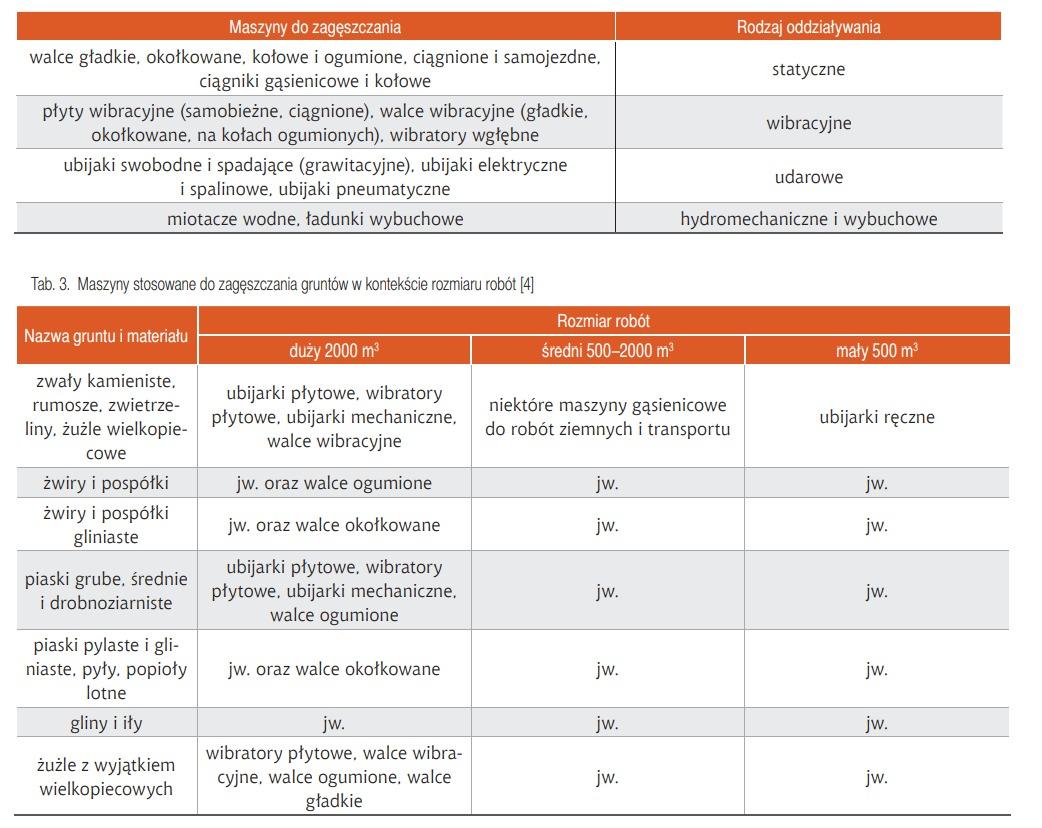
Tab. 2. Maszyny do zagęszczania gruntu i rodzaje ich oddziaływania [3]
Tab. 3. Maszyny stosowane do zagęszczania gruntów w kontekście rozmiaru robót [4]
Tab. 2. Maszyny do zagęszczania gruntu i rodzaje ich oddziaływania [3]
Maszyny do zagęszczania Rodzaj oddziaływania
walce gładkie, okołkowane, kołowe i ogumione, ciągnione i samojezdne,
ciągniki gąsienicowe i kołowe statyczne
płyty wibracyjne (samobieżne, ciągnione), walce wibracyjne (gładkie,
okołkowane, na kołach ogumionych), wibratory wgłębne wibracyjne
ubijaki swobodne i spadające (grawitacyjne), ubijaki elektryczne
i spalinowe, ubijaki pneumatyczne udarowe
miotacze wodne, ładunki wybuchowe hydromechaniczne i wybuchowe
Tab. 3. Maszyny stosowane do zagęszczania gruntów w kontekście rozmiaru robót [4]
Nazwa gruntu i materiału
Rozmiar robót
duży 2000 m3 średni 500–2000 m3 mały 500 m3
zwały kamieniste,
rumosze, zwietrzeliny, żużle wielkopiecowe
ubijarki płytowe, wibratory
płytowe, ubijarki mechaniczne,
walce wibracyjne
niektóre maszyny gąsienicowe
do robót ziemnych i transportu ubijarki ręczne
żwiry i pospółki jw. oraz walce ogumione jw. jw.
żwiry i pospółki
gliniaste jw. oraz walce okołkowane jw. jw.
piaski grube, średnie
i drobnoziarniste
ubijarki płytowe, wibratory
płytowe, ubijarki mechaniczne,
walce ogumione
jw. jw.
piaski pylaste i gliniaste, pyły, popioły
lotne
jw. oraz walce okołkowane jw. jw.
gliny i iły jw. jw. jw.
żużle z wyjątkiem
wielkopiecowych
wibratory płytowe, walce wibracyjne, walce ogumione, walce
gładkie
jw. jw.
Literatura
- [1] Martinek W., Nowak P., Woyciechowski P.: Technologie robót budowlanych. Ofi cyna Wydawnicza Politechniki Warszawskiej. Warszawa 2010.
- [2] Koselnik G.: Poradnik operatora. Koparka jednonaczyniowa. Warszawa 2015.
- [3] Pisarczyk S.: Geoinżynieria. Metody modyfi kacji podłoża gruntowego. Warszawa 2005.
- [4] Zieliński Z., Stefańczyk B.: Roboty ziemne. Szczecin 1997.